

File containing the GPS functions. More...
#include <__cross_studio_io.h>#include <msp430x16x.h>#include <math.h>#include "main.h"#include "gps.h"#include "parser_nmea.h"#include "oled.h"
Include dependency graph for gps.c:

Functions | |
| void | toggleGPS (unsigned int state) |
| Toggle GPS (P4.0, ENABLE_GPS) More... | |
| void | toggleGPSInterrupt (unsigned int state) |
| Toggle GPS interrupt. More... | |
| void | enableUSARTforGPS (void) |
| Enable and config USART for GPS. | |
| void | gpsSend (char *message) |
| Send sentences to GPS to configure it (interrupt mode) More... | |
| void | usart0_rx (void) |
| Receive function for GPS data (USART0, interrupt mode) | |
| float | calcDistance (float lat1, float lon1, float lat2, float lon2) |
| Calculate the distance between two points (Haversine formula) More... | |
| float | deg2rad (float deg) |
| Degrees to radians converter. More... | |
Variables | |
| unsigned int | dataValid |
| gps_data | GPSData |
| Store GPS valid data. More... | |
Detailed Description
File containing the GPS functions.
Function Documentation
| float calcDistance | ( | float | lat1, |
| float | lon1, | ||
| float | lat2, | ||
| float | lon2 | ||
| ) |
Calculate the distance between two points (Haversine formula)
- See also
- Wikipedia
- Parameters
-
lat1 The latitude of the first point lon1 The longitude of the first point lat2 The latitude of the second point lon2 The longitude of the second point
- Returns
- The distance (in km)
Here is the call graph for this function:

| float deg2rad | ( | float | deg | ) |
Degrees to radians converter.
- Parameters
-
deg The angle in degrees
- Returns
- The angle in radians
Here is the caller graph for this function:

| void gpsSend | ( | char * | message | ) |
Send sentences to GPS to configure it (interrupt mode)
- Parameters
-
message Message to send
Here is the caller graph for this function:

| void toggleGPS | ( | unsigned int | state | ) |
Toggle GPS (P4.0, ENABLE_GPS)
1 = enable, 0 = disable
- Parameters
-
state The new state
Here is the caller graph for this function:

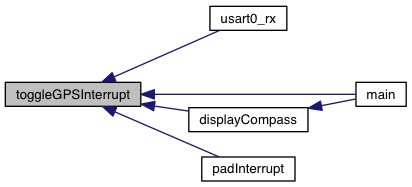
| void toggleGPSInterrupt | ( | unsigned int | state | ) |
Toggle GPS interrupt.
1 = interrupt enable for GPS, 0 = disable
- Parameters
-
state The new state
Here is the caller graph for this function:
Variable Documentation
| unsigned int dataValid |
Data are valid or not?
| gps_data GPSData |
Store GPS valid data.
Useful data received and valid.
